STM32 VCP Serial Monitor

NucleoG474RE에서 VCP를 활용한 시리얼 모니터 설정
STM32 NucleoG474RE에서
printf를 사용한 디버깅을 위해, 보드에 내장된 STLink의 Virtual COM Port(VCP)를 통해 시리얼 모니터를 설정하는 방법을 알아보겠습니다.
목차
1 VCP 포트 설정
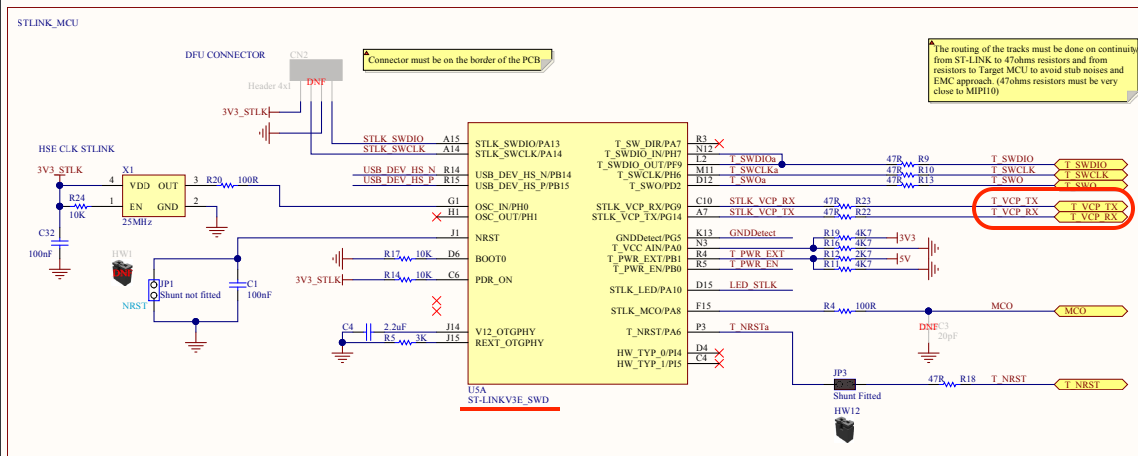
먼저, NucleoG474RE 보드에 STLink V3의 VCP가 있는지 회로도를 통해 확인합니다.
VCP의 TX, RX 핀은 LPUART1에 연결되어 있으며, 각각 PA2와 PA3 핀에 할당되어 있습니다.
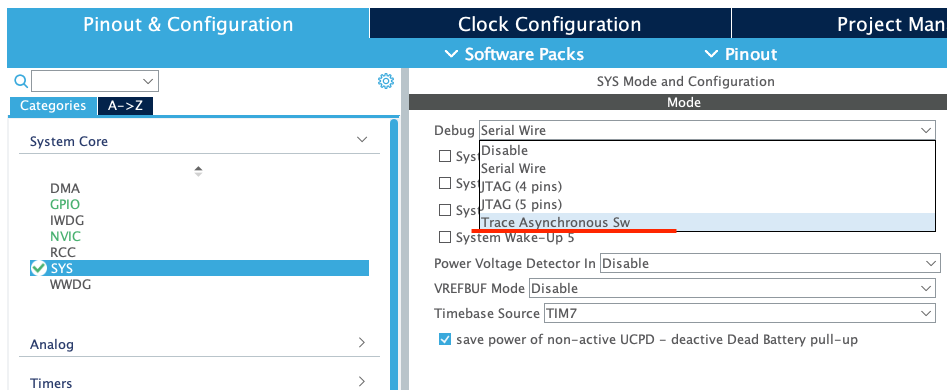
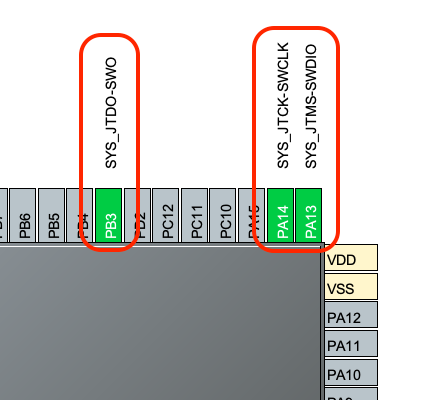
Serial Wire Viewer (SWD + SWO)는 ARM 기반 MCU에서 printf를 사용하여 펌웨어의 디버깅 정보를 출력하는데 유용합니다. SYS Mode and Configuration에서 Trace Asynchronous SW를 설정합니다.
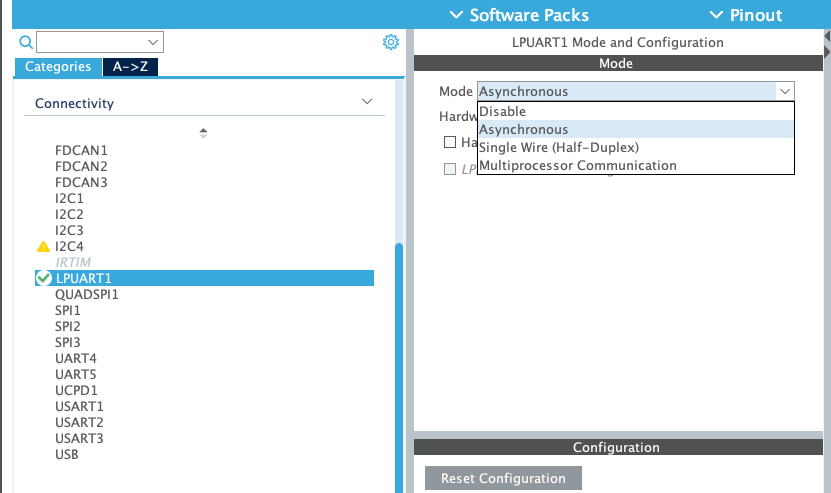
이후 LPUART1을 활성화합니다.
CubeIDE에서 핀 수동 설정
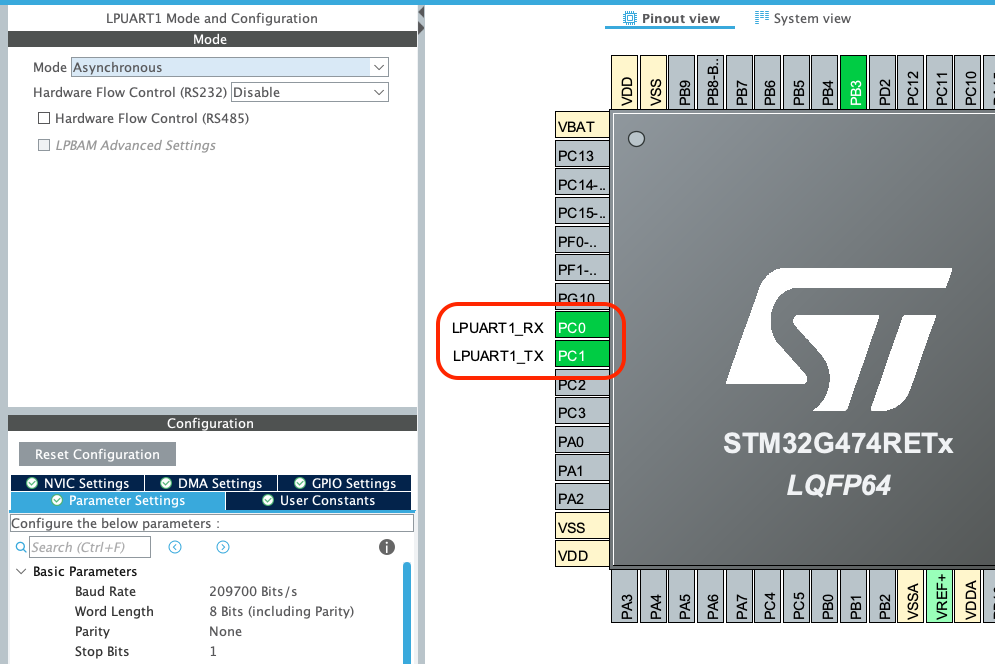
기본적으로 PC0와 PC1 핀이 자동으로 할당되지만, 회로도에 따라 PA2와 PA3 핀을 수동으로 설정해야 합니다.
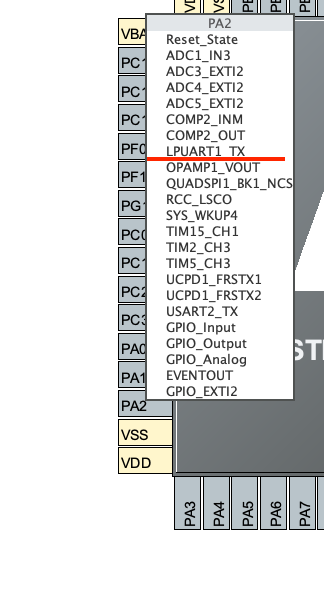
PA2에서 LPUART1_TX를 선택합니다.
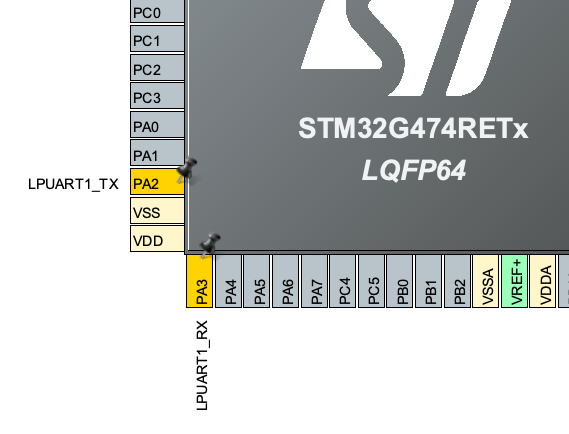
각 핀을 설정한 후에는 고정된 모습을 확인할 수 있습니다.
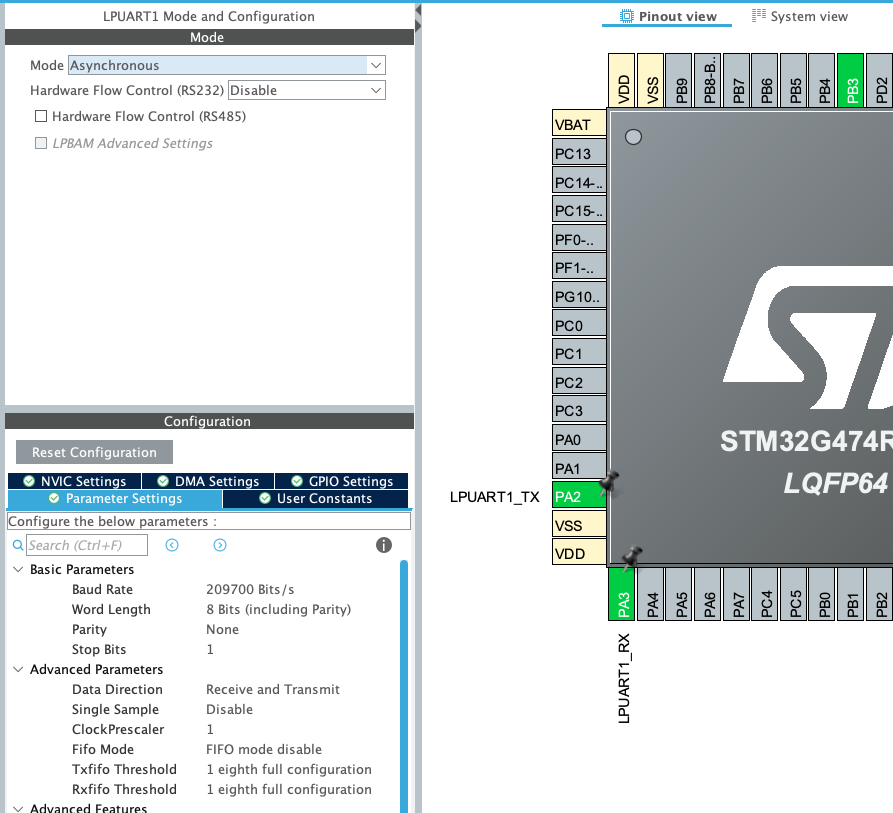
마지막으로 LPUART1을 활성화하여 원하는 핀으로 설정을 완료합니다.
2 Baud Rate 및 클럭 설정
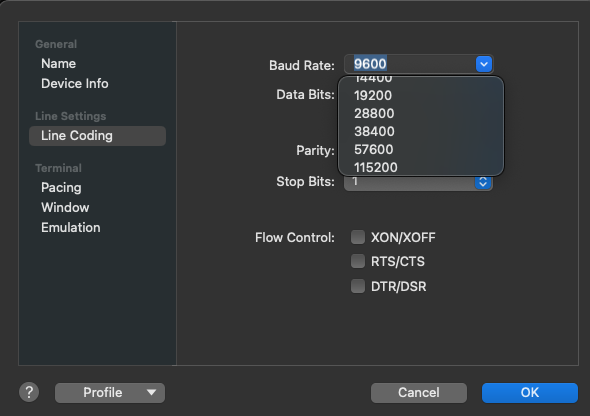
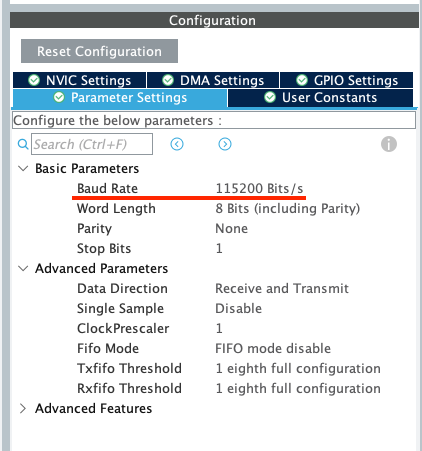
시리얼 통신의 Baud Rate는 기본적으로 209700 Bits/s로 설정되어 있지만, 이를 115200으로 변경하겠습니다.
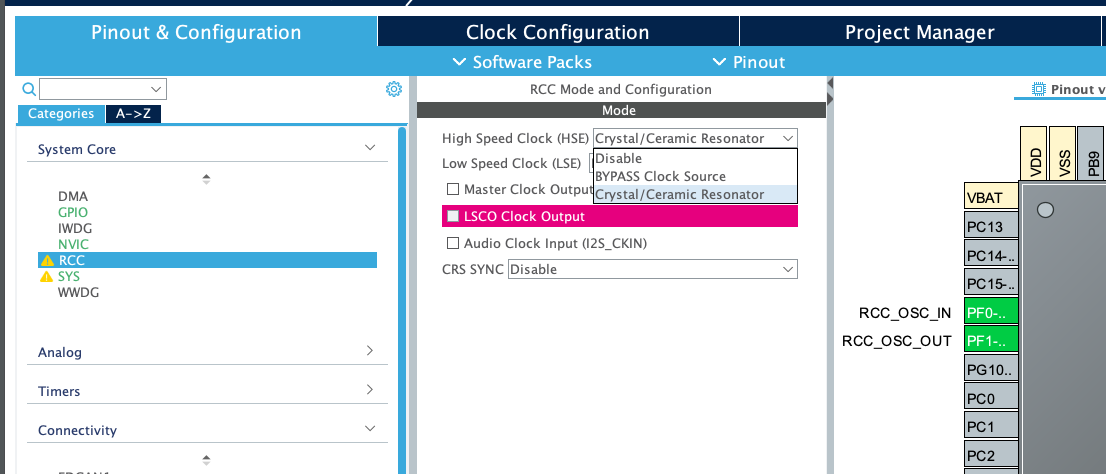
다음으로, NucleoG474RE 보드의 외부 크리스털을 이용하여 클럭을 설정합니다.
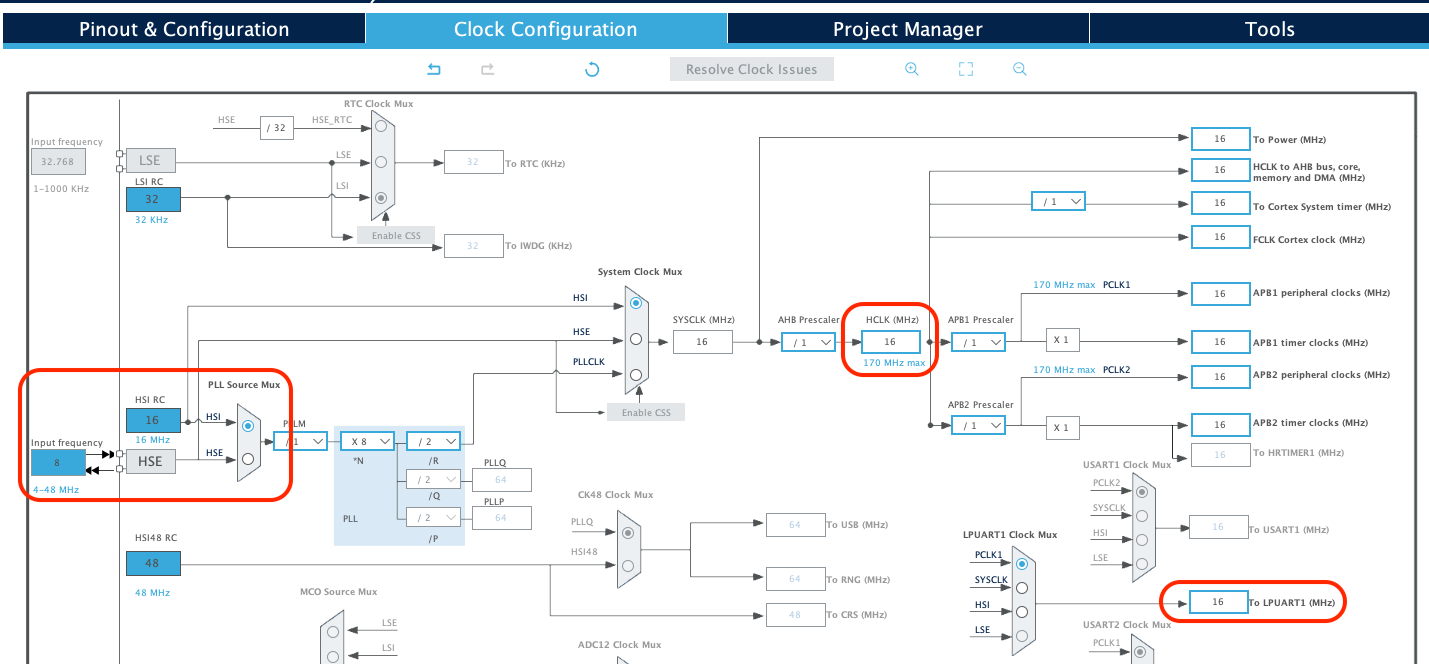
초기 상태의 클럭 설정 화면에서 Clock Source와 최대 클럭 주파수, 그리고 LPUART1에 적용되는 클럭 설정을 확인한 후 필요한 값을 입력하여 수정합니다.
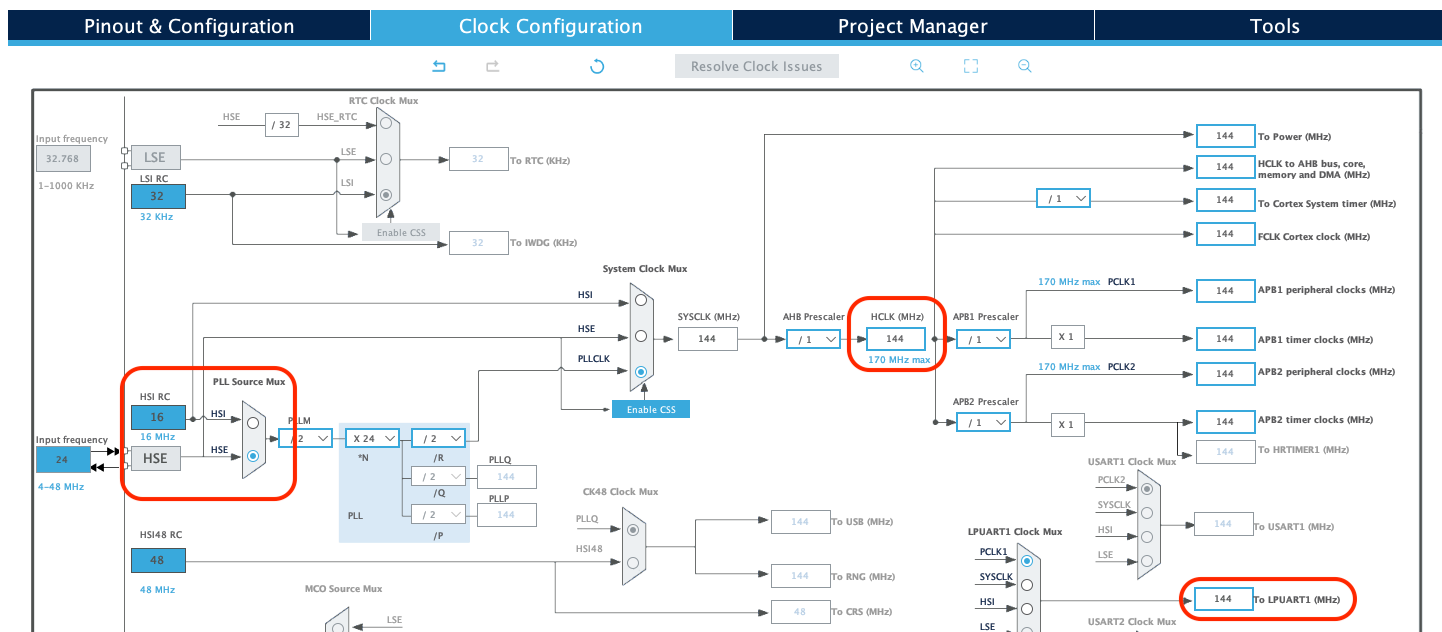
HSE를 입력 주파수로 사용하여 원하는 클럭 값으로 설정합니다. STM32CubeIDE는 자동으로 최적의 조합을 찾아 설정해 줍니다. 저는 최대 170MHz 중 144MHz로 설정했습니다.
3 Hello Task 출력 확인
기본 설정이 완료되었으니, printf 함수를 사용하여 시리얼 출력을 확인하겠습니다. 이를 위해서는 몇 가지 코드 작업이 필요합니다.

1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
#include "stdio.h"
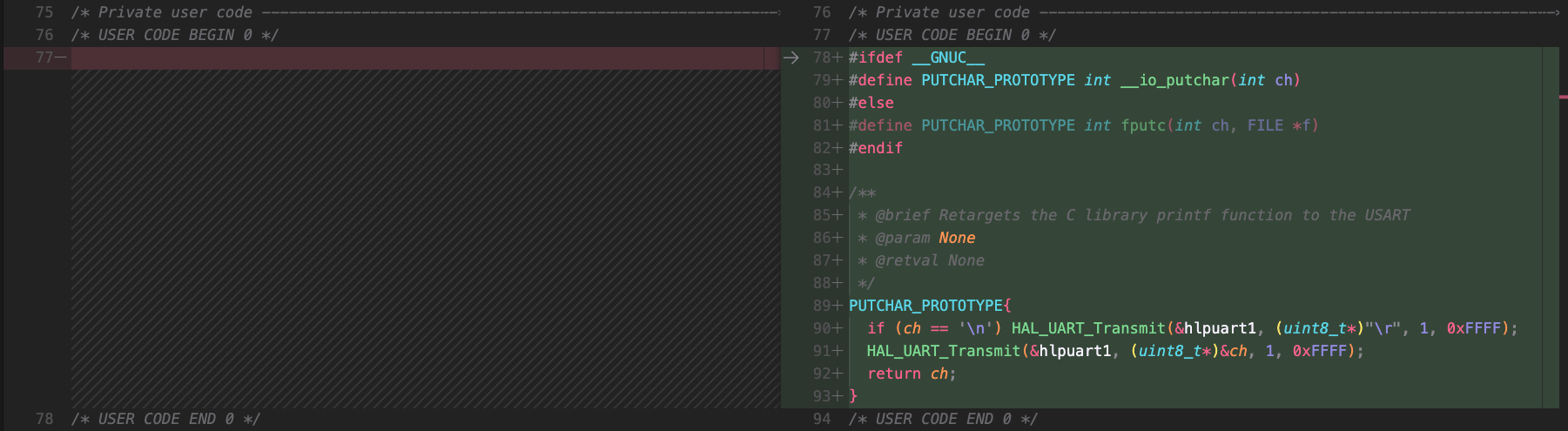
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
/**
* @brief Retargets the C library printf function to the USART
* @param None
* @retval None
*/
PUTCHAR_PROTOTYPE{
if (ch == '\n') HAL_UART_Transmit(&hlpuart1, (uint8_t*)"\r", 1, 0xFFFF);
HAL_UART_Transmit(&hlpuart1, (uint8_t*)&ch, 1, 0xFFFF);
return ch;
}
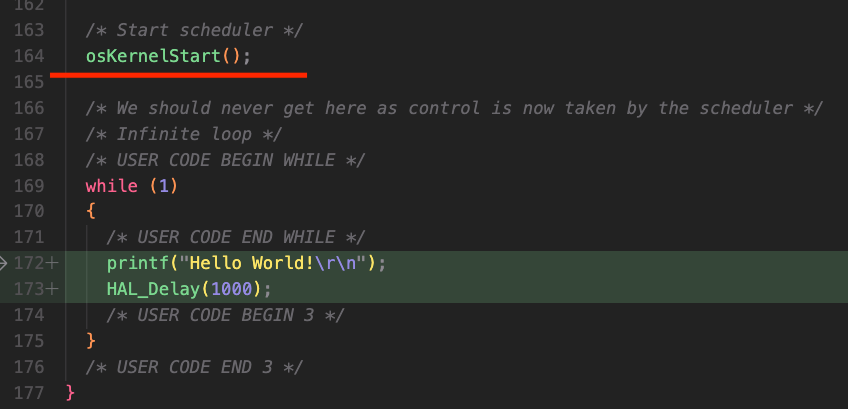
주석에서 설명한 것처럼, 스케줄러가 시작되는 osKernelStart 이후에는 while 루프 외부에 있는 코드는 실행되지 않습니다. 따라서 출력 함수를 while 문이 아닌 DefaultTask 영역에 작성해야 합니다.

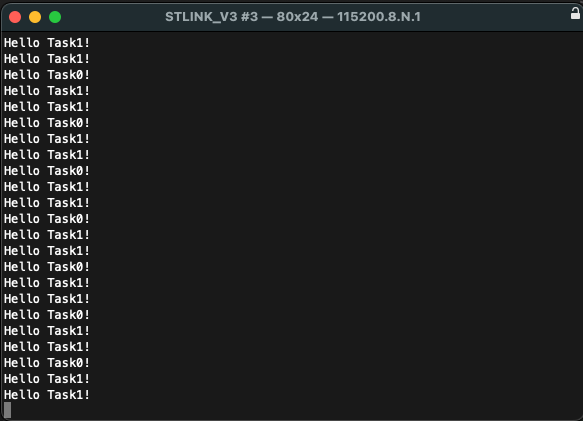
이제 시리얼 모니터를 통해 정상적으로 출력되는 것을 확인할 수 있습니다.
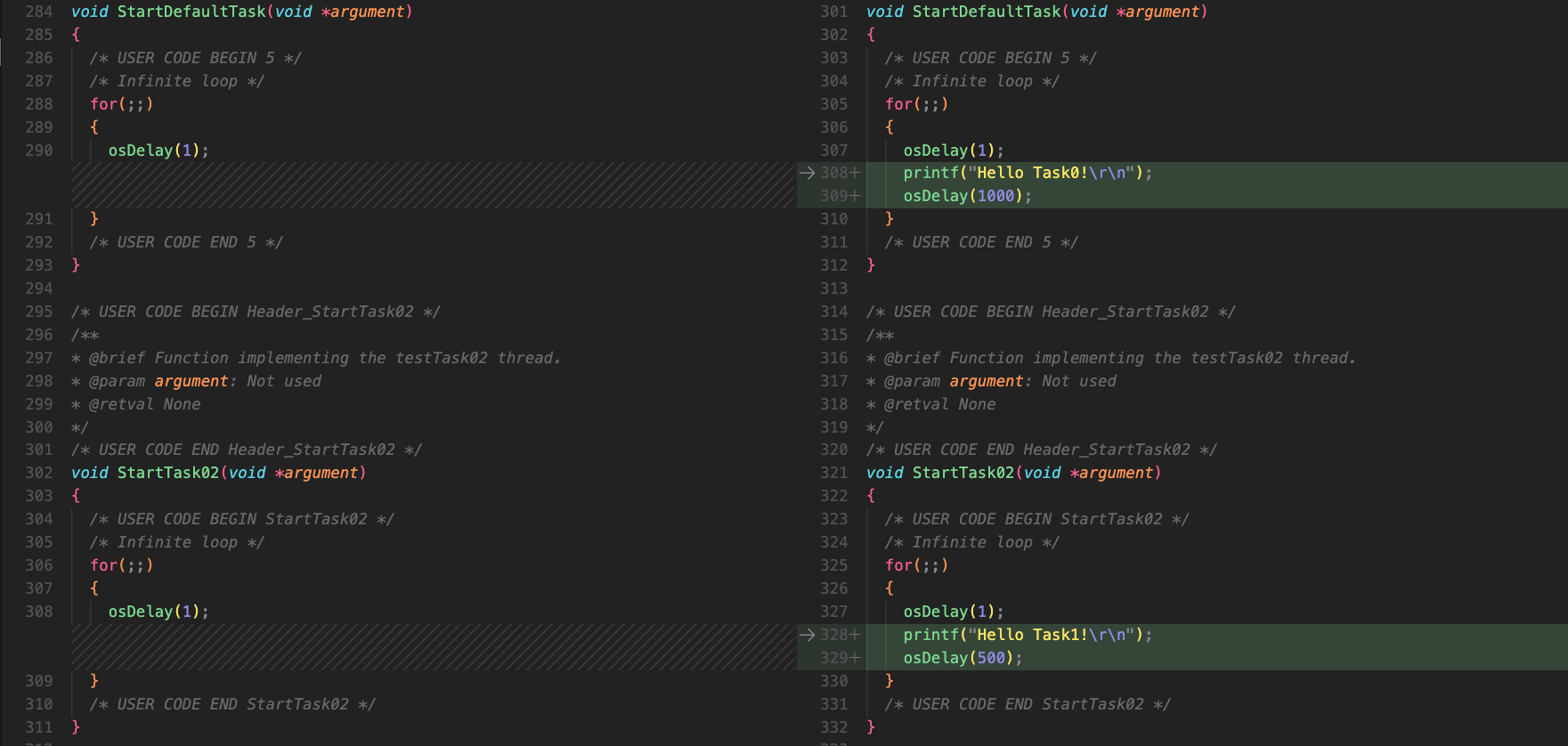
마지막으로, FreeRTOS에서 생성한 Task가 제대로 동작하는지 확인하기 위해 앞서 작성한 코드를 실행해 보겠습니다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
void StartDefaultTask(void*argument){
for(;;){
osDelay (1):
printf("Hello TaskO!\r\n");
osDelay (1000):
}
}
void StartTask02 (void*argument){
for(;:){
osDelay (1);
printf ("Hello Task1!\r\n" );
osDelay (500);
}
}